La arquitectura de microservicios se ha convertido en un paradigma clave para desarrollar aplicaciones escalables y resilientes. TARS (Transparent Application Service) proporciona un marco técnico robusto para implementar microservicios con características avanzadas de comunicación, descubrimiento y escalabilidad, este artículo ofrece una visión detallada, enfocada en los aspectos técnicos de diseñar e implementar microservicios.
Principios Fundamentales de los Microservicios
Los microservicios, como arquitectura, se rigen por principios que facilitan su diseño y mantenimiento:
- Desacoplamiento: Cada microservicio es independiente en su funcionalidad y datos.
- Despliegue Independiente: Los microservicios pueden desplegarse, actualizarse y escalarse de forma autónoma.
- Responsabilidad Única: Cada microservicio está enfocado en un único contexto o funcionalidad.
- Comunicación Ligera: Los servicios interactúan mediante APIs o mecanismos RPC eficientes.
TARS respalda estos principios mediante su diseño modular y su enfoque en la gestión de servicios distribuidos.
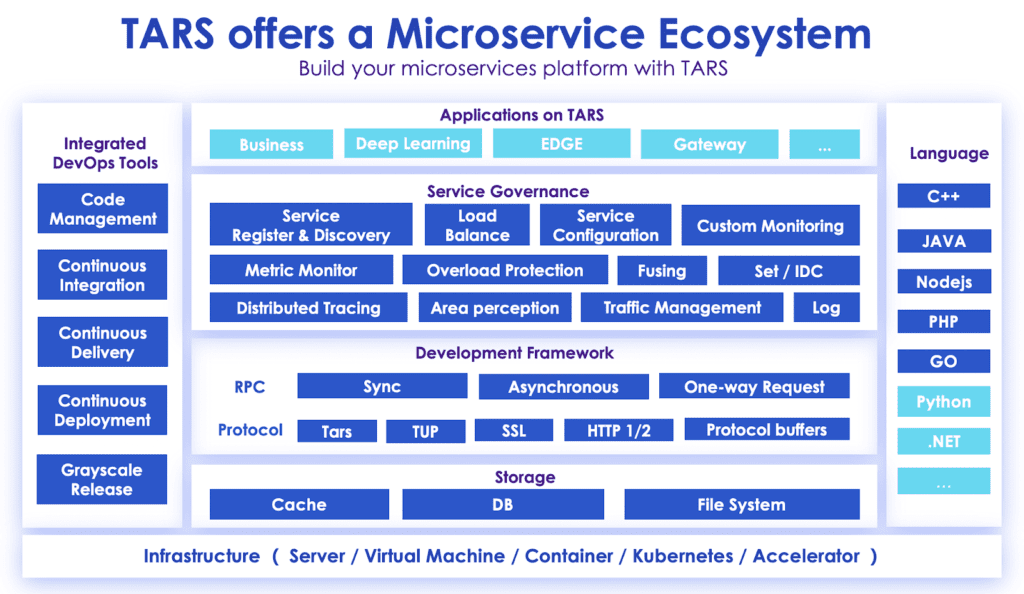
Componentes de su Arquitectura
Su arquitectura está diseñada para soportar aplicaciones distribuidas de alta escala y se compone de los siguientes elementos:
1. Framework RPC:
- Proporciona comunicación de alta eficiencia entre microservicios mediante llamadas a procedimientos remotos (Remote Procedure Calls).
- Soporta serialización y deserialización automáticas para reducir la complejidad del desarrollo.
2. TARS Registry:
- Actúa como un sistema de descubrimiento de servicios donde cada microservicio se registra con su dirección y metadatos.
- Permite la resolución dinámica de dependencias entre servicios.
3. TARS Gateway:
- Gestiona el tráfico entrante desde los clientes hacia los microservicios.
- Implementa balanceo de carga y mecanismos de autenticación.
4. TARS Admin:
- Una interfaz de administración para gestionar configuraciones, monitoreo y despliegue de microservicios.
5. Balanceo de Carga Dinámico:
- Distribuye las solicitudes entre las instancias activas de un servicio para optimizar el rendimiento.
Diseño de Microservicios
Definición del Servicio
Un servicio se define utilizando un archivo de interfaz TARS (TARS IDL – Interface Definition Language). Este archivo especifica las funciones expuestas por el servicio, los tipos de datos y las reglas de comunicación.
Ejemplo de un archivo TARS IDL:
module UserService {
interface User {
string GetUserInfo(int userId);
int CreateUser(string name, string email);
}
}
Este archivo describe un servicio de gestión de usuarios con dos métodos:
GetUserInfo: Devuelve información del usuario basado en su ID.CreateUser: Crea un nuevo usuario con nombre y correo electrónico.
Generación del Código Stub
TARS genera automáticamente código cliente y servidor a partir del archivo IDL, lo que reduce errores y acelera el desarrollo.
Para generar el código:
tars2cpp --tars UserService.tars
Este comando crea archivos de cliente y servidor en C++.
Implementación del Servicio
El desarrollador implementa las funciones definidas en el archivo IDL dentro del código del servidor.
Ejemplo en C++:
#include "UserService.tars"
class UserServiceImpl : public UserService::User {
public:
string GetUserInfo(int userId) override {
// Implementación lógica
return "{\"id\": " + to_string(userId) + ", \"name\": \"John Doe\"}";
}
int CreateUser(const string& name, const string& email) override {
// Lógica para crear un usuario
return 0; // Devuelve 0 en caso de éxito
}
};
Configuración del Servicio
Los servicios se configuran mediante un archivo .conf, donde se especifican detalles como el puerto, las rutas de registro y las dependencias.
Ejemplo de configuración:
app="UserApp" server="UserServer" local_ip="127.0.0.1" local_port=3000 registry="127.0.0.1:17890" log_path="/var/log/tars/"
Registro del Servicio
Una vez configurado, el servicio se registra en el TARS Registry ejecutando el servidor:
./UserServer --config=UserServer.conf
El servicio ahora está disponible para que otros servicios o clientes lo descubran y lo utilicen.
Despliegue y Escalabilidad
Despliegue Automatizado
TARS Admin facilita el despliegue automatizado de microservicios. A través de la interfaz web, puedes:
- Subir nuevos binarios de los servicios.
- Configurar instancias y escalabilidad.
- Supervisar el estado de los servicios desplegados.
Balanceo de Carga y Alta Disponibilidad
TARS maneja el balanceo de carga automáticamente. Si un servicio experimenta alta demanda, puedes agregar nuevas instancias, y se distribuirá las solicitudes entre ellas.
Ejemplo de configuración para escalar:
{
"service": "UserServer",
"instances": 3,
"strategy": "round-robin"
}
Observabilidad y Monitoreo
TARS Log System
Los servicios generan logs estructurados que pueden centralizarse para facilitar el monitoreo. Esto incluye:
- Logs de solicitud/respuesta.
- Métricas de rendimiento.
- Eventos de error.
TARS Stat System
El sistema de estadísticas de TARS permite visualizar:
- Latencia de las llamadas RPC.
- Tasa de éxito/fallo.
- Tiempo promedio de respuesta por servicio.
Estas métricas se presentan en tiempo real en el dashboard de TARS Admin.
Integración con Ecosistemas Existentes
Soporte Multilenguaje
Tiene soporte para diversos lenguajes de programación, como C++, Java, Go, Node.js y Python, permitiendo integrar microservicios heterogéneos.
Ejemplo: Un sistema donde el backend principal está en Java y los servicios secundarios en Python pueden comunicarse sin problemas usando TARS RPC.
Interoperabilidad con Contenedores
Puede integrarse con Kubernetes para gestionar despliegues de contenedores, combinando las fortalezas de ambas plataformas.
Ejemplo de integración:
- Empaqueta el servicio TARS en un contenedor Docker.
- Despliega el contenedor en un clúster de Kubernetes.
- Usa TARS Gateway para gestionar la comunicación y el descubrimiento de servicios.


